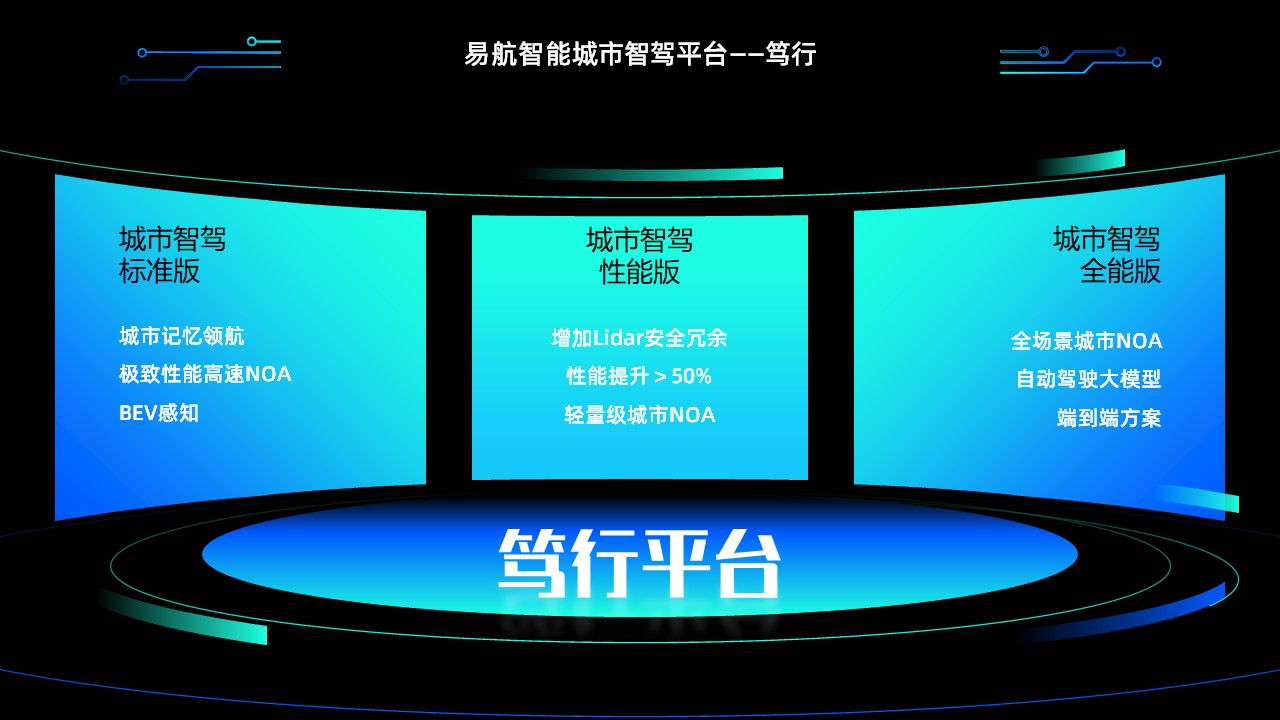
2024北京車展盛大開幕。作爲國內自動駕駛量産頭部企業,易航智能正式發布“笃行”城市智駕平台,采用量産級BEV“靈眸”,包括城市智駕標准版、城市智駕性能版和城市智駕全能版三款系列方案,其中首推的基于地平線征程6E的城市智駕標准版涵蓋極致性能高速NOA、城市記憶領航等高階智駕功能,整套價格不高于5000元,將爲用戶提供極具性價比的城市場景智駕方案。
自2022年率先量産NOA行泊一體方案以來,易航智能依托全棧自研技術和豐富的量産經驗,持續發力領航輔助駕駛NOA領域,加速邁向城市智駕新場景。在發布會現場,易航智能宣布與行業領先的高效能智能駕駛計算方案提供商地平線達成戰略合作,正式加入征程6首批軟件算法合作夥伴,雙方將攜手推動高階智駕量産邁向新階段。

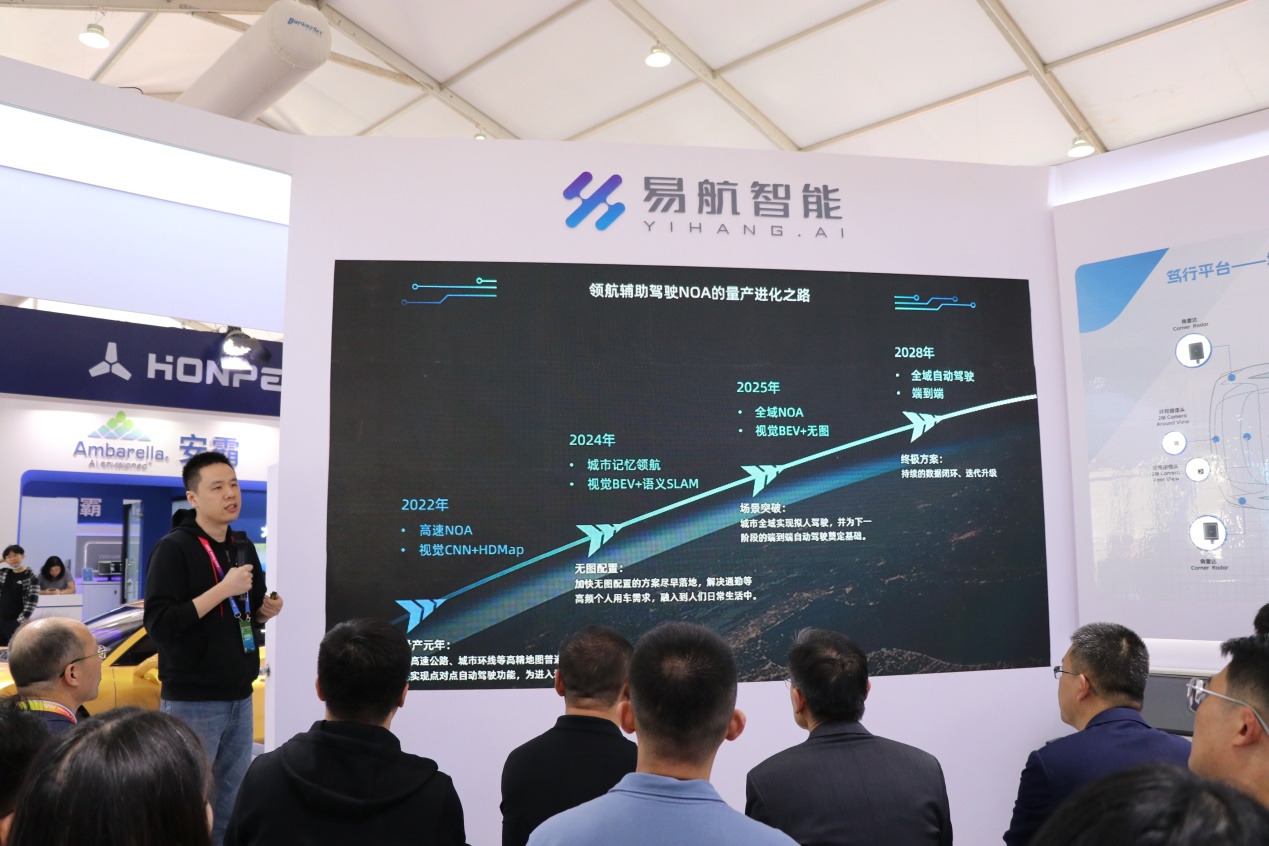
領航輔助駕駛NOA量産進化之路
作爲國內最早一批自動駕駛科技公司,易航智能始終堅持以量産爲目標,自2015年成立之初就確定了漸進式的發展路徑。技術演進至當下,易航智能不僅積累了大量自動駕駛技術的量産經驗,更明確了完整的自動駕駛量産路線。
NOA功能是自動駕駛量産路線上的重要節點。NOA出現之前,所有輔助駕駛功能都是碎片化的,而NOA實現了點到點的自動駕駛功能,從而爲用戶帶來了沉浸式駕乘體驗。自動駕駛的發展路線就是基于NOA量産計劃之路。

2022年,易航智能基于高精地圖與視覺卷積神經網絡技術,率先量産高速NOA,這一年也普遍被行業視爲高速NOA量産元年。在高速NOA的技術基礎之上,NOA功能有兩大發展方向,其一是拓展高速NOA場景,其二是提升現有高速NOA的産品性能。從這兩個方向出發,2024年,易航智能在高速NOA基礎上陸續加入城市應用場景,開發了城市記憶領航功能;同時爲高速NOA引入BEV算法,以提升高速NOA的感知性能。下一個階段,隨著NOA功能在城市場景中的數據積累和算法叠代,預計將在一至兩年內以BEV感知+無圖技術方案實現城市NOA,並爲之後的端到端自動駕駛奠定基礎。
聚焦到當下,通過在高速NOA算法框架基礎上添加道路記憶模塊,易航智能實現了城市記憶領航功能。其中,新功能算法有超過85%的部分源自高速NOA算法的複用及微調,即量産高速NOA算法就相當于具備了城市智駕的骨幹算法。
同時,通過對高速NOA算法的叠代,在通行效率、感知能力、安全等維度實現高速NOA的性能提升,讓高速NOA真正實現從可用到好用。例如,通過優化多車道路徑規劃以及車流監測機制,提升了自動超車並線效率,從而實現了更高的通行效率;通過提高道路邊界檢測範圍,可更精准地識別道路臨時施工場景,實現重感知輕地圖的技術方案。
清晰的技術路徑規劃和産品演進步驟,易航智能從量産角度出發,以領航輔助駕駛NOA進化之路展現了其在自動駕駛技術競爭中的核心實力。
量産級BEV靈眸:拓展城市智駕邊界
在領航輔助駕駛NOA的量産進化中,易航智能全棧自研的量産級BEV“靈眸”作爲“笃行”平台的重要組成部分,肩負著拓展城市智駕邊界的重任。
無論是高速NOA,還是城市記憶領航,都是在特定場景下實現的點對點的自動駕駛,無法覆蓋整個城市。爲了進一步拓展城市智駕場景,需要引入BEV感知算法,而爲了推動BEV符合車規級量産條件,就必須結合傳統感知算法的核心模塊作爲補充,實現遠焦感知、交通標志識別等必備能力。此外,傳統感知算法量産也是BEV量産條件的重要界定,只有量産過傳統感知算法才能界定BEV是否達到量産條件。
易航智能是國內少有的自研感知算法至量産的自動駕駛公司,傳統多相機融合感知方案可以實現遮擋下的快速識別,精准區分遠/中/近距離的高密度目標。而與其感知方案同源的量産級BEV“靈眸”也吸納了這些優秀能力。當前,“靈眸”已成功移植至征程6E平台,匹配極致性能高速NOA、城市記憶領航等高階智駕功能,未來還將進一步拓展升級,實現全場景自動駕駛。值得一提的是,部署“靈眸”的地平線征程6E方案還可按照客戶需求提供多種配置,兼顧成本和功能雙重需求。

面對無人駕駛的終極目標,易航智能從全棧自研入手,以技術爲本,圍繞核心場景加速推進NOA量産進化,突破智能駕駛行業制高點,致力于成爲全球AI智駕方案提供商。
(完)
關于易航智能
易航智能是中國最早一批成立的自動駕駛公司,全棧自研感知、決策、規控等核心算法,提供ADAS、NOA、FSD等解決方案及域控制器、攝像頭模組等産品,2016年即拿到首個量産項目,發展至今積累了超5億公裏駕駛數據,主要客戶包括理想汽車、北汽集團、上汽大通、洛轲極石、江鈴雷諾、一汽大衆、威馬汽車等主機廠。
易航智能擁有人工智能+車輛工程雙基因團隊,2021年易航智能自研純視覺AEB獲得C-NCAP & E-NCAP雙五星評級,相關車型出口歐洲,覆蓋德國、意大利、法國、比利時、西班牙等主要國家;2022年率先在輕量級計算平台量産了NOA行泊一體方案,提供覆蓋全國的高速公路、城市環線等場景的點對點自動駕駛功能;2023年獲得主機廠城市NOA項目定點,2024年將落地BEV方案。
公司創始人、董事長陳禹行是吉林大學車輛工程專業博士,師從吉林大學郭孔輝院士、UC Berkeley 美國工程院院士J. Karl Hedrick 教授,精通車輛動力學和控制、駕駛員模型和故障診斷。在美就讀期間于VDL和MPC實驗室負責車輛智能控制項目,在國內負責過多項大型底盤集成控制項目和課題,擁有三十余項發明專利,現任7家國際頂級汽車學術期刊審稿人,發表多篇專業論文。
