報告出品方:方正證券
以下爲報告原文節選
------
1 城市導航輔助駕駛逐漸落地,高精度定位快速發展
1.1 城市 NOA 快速落地,高精度定位潛力逐步釋放
自 2023 年起,以城市 NOA 爲代表的 L3 級別功能正快速在市場上落地,華爲、小鵬等品牌陸續發布高端智能駕駛車型,蔚來、智己和魏牌也計劃在 2024 年將城市NOA拓展至百個以上城市的品牌。智能駕駛已越發成爲各車企競爭的核心領域,我們認爲 2024 年或成智能駕駛元年。
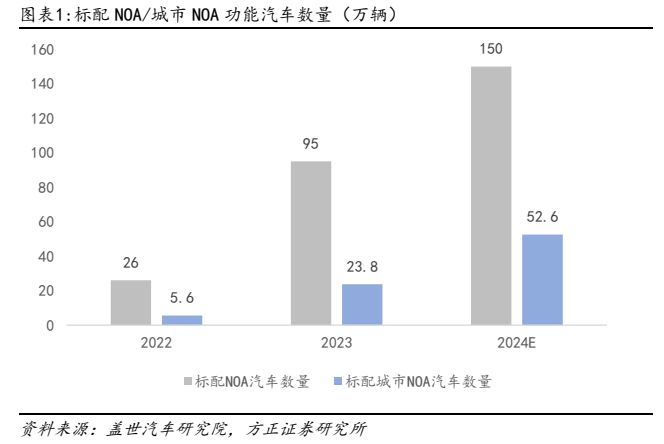
近年來,搭載城市 NOA 功能的車型數量及滲透率顯著增長。根據蓋世汽車研究院的數據顯示,2022 年搭載 NOA 功能的車型爲 26 萬輛,2023 年達到 95 萬輛,2024預計將達到 150 萬輛。2022 年搭載城市 NOA 功能的車型爲 5.6 萬輛,2023 年達到 23.8 萬輛,增長率爲 323.7%。從 2022 年 Q1 到 2023 年 Q4,搭載城市 NOA 車型數量從 0.4 萬輛增長到 8.5 萬輛,滲透率從 0.1%增長到 1.4%。
伴隨著自動駕駛從高速 NOA 向城市 NOA 快速推進,對高精度定位的技術要求也在不斷提升,依靠單一定位技術無法滿足自動駕駛汽車所需的高精度,技術變革不斷湧現:
1)城區道路的複雜性使精度定位要求更高:城市車道多變,交通流複雜,尤其是要在城市十字路口等複雜地段實現城市 NOA,高精度定位精度需達到厘米級;
2)在算法上引入 PPP-RTK:從算法層面統一了 PPP 和 RTK 技術,可實現快速、實時的高精度定位。而且 PPP-RTK 可支持衛星播發和移動通信兩種方式,其中衛星播發可以使用低軌衛星;
3)雙頻 RTK 成爲城市 NOA 技術支撐的主流:雙頻 RTK 經過多年的叠代已在行業內達成共識,且雙頻 RTK 可以實現更高精度的定位,對城市 NOA 技術的發展十分重要;
4)深耦合算法在城市智駕中更具優勢:相較于松耦合和緊耦合技術,深耦合可以有效提升組合導航的精度和可靠性,尤其是在城市高架環島等惡劣的環境下,可有效縮小定位誤差;
5)低軌衛星入局以解決衛星信號被遮蔽問題:在城市場景下,經常出現高樓、高架等信號遮擋場景,使用低軌衛星可以增強信號的覆蓋,進一步提升衛星信號的可靠性。

技術的發展與政策的支持,高精度定位或將迎來發展新契機。在高精度定位 2.0階段,即 2023 年高速 NOA 嘗試進入城市過程中,伴隨電動化和智能化的提升,以及北鬥、5G 等技術發展,出現的從“重地圖、輕感知”到“輕地圖、重感知”的技術路線的變化,以解決高精地圖進城遭遇的成本和鮮度難題,在這過程中高精度定位的作用發生變化,這也給産業鏈帶來新的變動和機會。同時根據國務院辦公廳發布的《關于印發國家衛星導航産業中長期發展規劃的通知》,明確提出要進一步提升衛星導航芯片、各類衛星導航系統兼容應用等技術水平,推動核心基礎産品升級,促進高性價比的導航、授時、精密測量、測姿定向等通用産品規模化生産。同時,國家發展改革委員會、科學技術部等政府部門也出台了許多相關領域的法律法規政策,推動高精度衛星導航定位産業上下遊市場不斷擴大和發展。
智能駕駛快速進步的大背景下,對高精度定位的技術要求隨之提高。2022-2025年,自動駕駛等級將由 L2/L2+逐步向 L3/L3+演進,高等級自動駕駛對定位精度的要求更高,定位精度需達厘米級,推動高精度組合定位技術持續發展。

1.2 高精度定位——提供絕對位置信息,潛在的增量組件
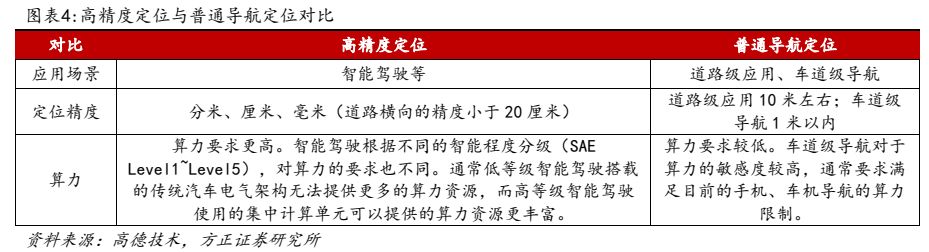
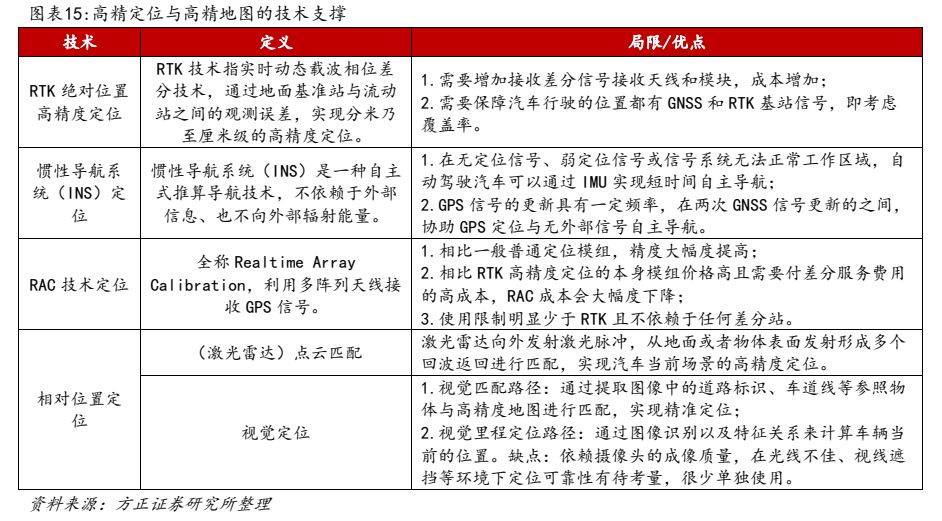
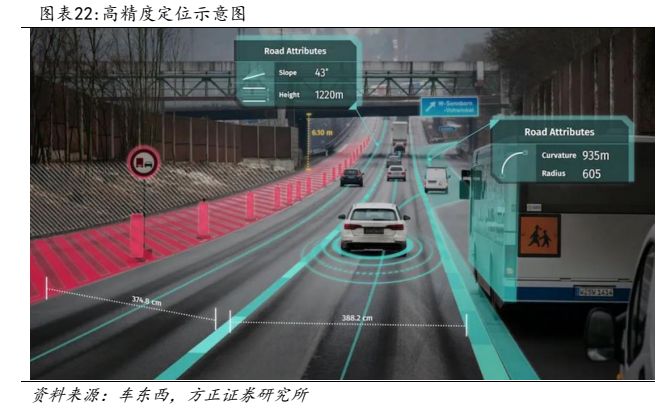
高精度定位提供更高精度的坐標定位,縮小傳統導航定位誤差。高精定位一般意義上指的是,通過特定的定位技術獲取在全球坐標系下的位置信息(含速度、方向、時間等全局信息),解算出來的位置坐標和真實位置坐標的精度更高。誤差範圍一般分爲厘米級、分米級和亞米級。高精度定位基于實時動態差分技術,提供更高精度的GNSS定位,實現從傳統的道路級識別到更精准的車道級識別的提升。
普通定位因爲有衛星誤差、大氣誤差、設備誤差等原因,導致最後定位精度在 10-30 米。而高精度定位通過誤差模型計算,使得定位能力提高,定位誤差降低,可幫助地圖應用識別到行駛中的具體車道,及時准確地進行語音播報。
此外,高精度定位相比與攝像頭、激光雷達等傳感器提供的是絕對位置信息。智能駕駛定位信息有相對與絕對之分,激光雷達和攝像頭等傳感器是通過對比其他物體,可實現厘米級的相對定位精度,而高精度定位是在現有地球坐標軸上進行絕對定位。高精度定位可以提供全天候的絕對位置信息,解決“我在哪”的問題,同時可以爲相對定位傳感器形成可靠性補充,爲自動駕駛提供高性價比的定位方案。
目前,使用較爲廣泛的高精定位技術分別是 RTK(實時動態定位:Real-Time Kinematic),即載波相位差分技術,以及 PPP(精密單點定位:Precise Point Positioning):RTK 技術基于兩個 GNSS 接收器,其中一個充當基准站,另一個作爲流動站。基准站精確定位並連續跟蹤衛星信號,同時記錄數據,而流動站接收衛星信號以定位自身,並從基准站獲取包含校正數據的 RTCM 信息來通過差分運算校正誤差。 主要特點是在實時中提供毫米級別的定位精度,可以解決衛星、傳輸軌迹以及接收機本身的誤差問題,但覆蓋區域小,並且精度隨著兩者之間的距離增加而降低。
PPP 技術則是通過 CPF 解算衛星誤差並傳輸給接收機做校正,允許用戶實現毫米級的三維位置精度,而無需依賴差分基站。與差分定位技術不同,PPP 技術不需要在接收器和差分基站之間建立通信鏈接。用戶只需單獨的 GNSS 接收器和訪問PPP 校正數據的互聯網連接,即可進行高精度定位,但需要更長收斂時間的衛星信號觀測來實現高精度。
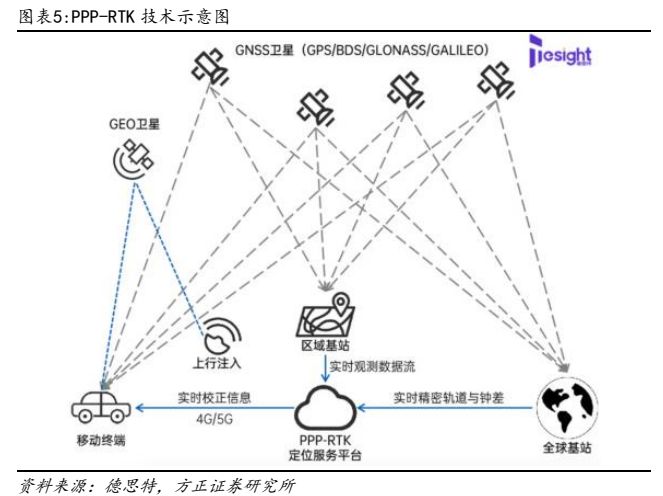
PPP-RTK 爲二者的結合,主要原理爲使用全球基站確定衛星鍾差、衛星軌道誤差;使用區域基准站對電離層誤差、對流層誤差等區域性誤差進行分析,建立整網的電離層延遲、對流層延遲等誤差模型;最終將全球和區域的誤差産品發送給移動終端進行定位。
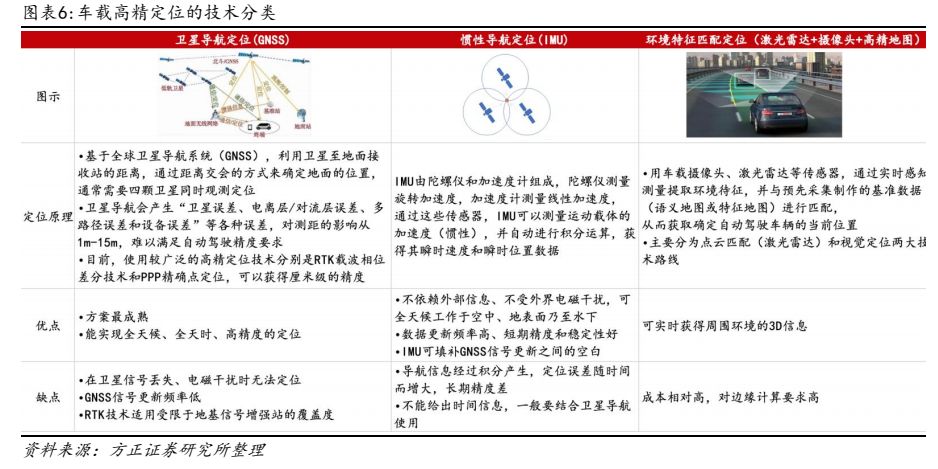
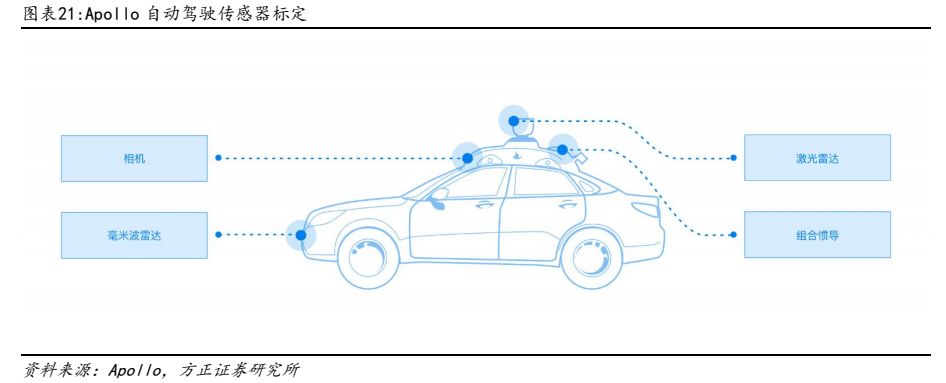
對于車載高精定位技術,衛慣組合(GNSS+IMU)使用最爲廣泛。高精定位主要有衛星定位、慣性定位、環境感知三種方式,目前衛慣組合導航(GNSS+IMU)是最廣泛使用的定位方案,GNSS 模塊和 IMU 模塊耦合的深度決定了組合導航的性能:其中衛星信號定位主要基于全球衛星導航系統(GNSS),GNSS 定位的基本原理是利用衛星至地面接收站的距離。其優勢在于能夠爲車輛提供絕對位置信息,且定位精度高,缺點在于部分遮擋場景下性能差且輸出頻率較低。
慣性導航(INS)是通過測量加速度來解算運載體位置信息的自主導航定位方法,包括慣性測量單元和計算單元兩部分。慣性測量單元 IMU 是融合了陀螺儀、加速度計、磁力計和壓力傳感器的多軸組合。
環境特征匹配定位主要基于相機的平面影像(圖片)和激光掃描雷達(LiDAR)的三維影像(點雲),通過實時感知測量提取環境特征,並與預先采集制作的基准數據進行匹配,從而獲取確定自動駕駛車輛的當前位置。其優點是在沒有 GNSS 情況下也可以工作,缺點是需要預先制作地圖基准數據,並且根據環境發生的變化需要定期更新地圖數據。
高精度定位服務在汽車行業的應用前景廣闊。首先,高精度定位硬件、軟件、位置校正服務是自動駕駛汽車的核心要素。惡劣天氣、重複場景、非視距場景和車載傳感器不穩定情況下,高精度定位在自動駕駛中起決定性作用。伴隨自動駕駛汽車的量産計劃在未來幾年的實現,高精度定位市場機遇隨之浮現。第二,隨著ADAS 功能逐步的進入傳統汽車,使之成爲傳統汽車的標配,高精度定位也正助力汽車突破功能邊界,爲用戶帶來更智能的行車體驗。第三,在 5G 及 C-V2X 迅速發展和快速普及的背景下,基于車聯網的應用業務快速擴展,而高精度定位作爲車聯網整體系統中的關鍵部分,結合對車輛高精度定位的場景分析和性能需求,應用于終端層、網絡層、平台層、應用層。

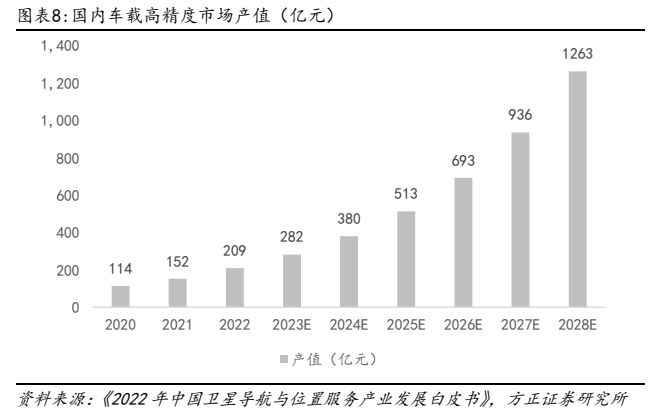
車載高精度定位市場進入高速發展,未來市場規模潛力巨大。國內高精度市場産值從 2010 年的 11 億元增長到 2022 年的 208.7 億元,受益北鬥三號衛星導航系統的開通,國內高精度定位市場的發展進入高速增長期,2020-2022 年高精度市場規模增長率分別達 48.83%、33.25%、37.4%。根據《2022 年中國衛星導航與位置服務産業發展白皮書》披露的我國高精度定位行業市場規模曆年增長情況分析,並進一步結合未來我國高精度定位行業發展趨勢以及宏觀發展環境狀況等因素綜合分析下,預計 2023-2028 年中國高精度定位行業市場規模有望以 35%的年複合增長率增長,至 2028 年底,中國高精度定位行業市場規模有望達到 1263.4 億元。
1.3 作爲戰略新興産業,時空服務市場廣闊
高精定位的應用場景廣泛:除了車輛導航、自動駕駛爲例的智慧出行領域,高精定位還應用于以基礎設施監測爲例的公共服務領域,以及電網、港口智能監測等産業升級領域,並滲透至大衆消費領域,廣泛應用于智能手機及智能穿戴。
第一,從行業市場看,高精度定位應用于重點運輸過程監控、公路基礎設施安全監控、港口高精度實時定位調度監控等領域,使綜合交通管理效率和運輸安全水平有所提升。同時可應用于測繪儀器,在抗擊新冠疫情的醫療基建施工以及地質災害監測預警系統的建設中發揮著重要作用,既保證了精確度,又縮短了勘察測量時間。
第二,從大衆市場看,高精度技術正全面走向大衆應用,包括輔助定位服務、自動駕駛服務以及智能穿戴。目前智能穿戴多以智能手機的輔助設備出現,例如智能手環、智能手表和智能眼鏡。5G 等新一代技術將推動國民生活智能化,進而助推高精定位技術應用往生活化場景逐步滲透。
第三,從特殊市場看,高精度技術涉及軍用、警用、防災減災、應急救援、公共安全等領域,同時還在防災減災、公安巡邏、監獄指揮管理、疫情防控等細分市場得到相應的應用部署。近年來,我國多地都針對地質災害多發區域,均部署了基于北鬥系統的高精度地質災害監測預警系統。
因此,在當前全球經濟邁向高質量發展的新背景下,公共基礎設施的運行、行業的解決方案或是大衆生活出行領域的數智化,都離不開以數據決策爲基礎。而高精定位作爲精准位置數據獲取的基礎技術,將延伸更多元化的符合市場發展的數據技術産品和服務,市場需求將持續提升。

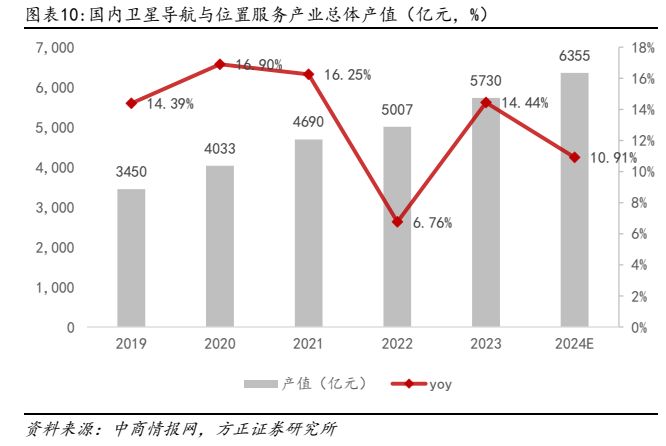
國內的高精定位及延申的衛星導航領域,市場前景廣闊。中國汽車工業協會發布的數據顯示,2023 年,我國汽車産銷分別完成 3016.1 萬輛和 3009.4 萬輛,同比分別增長 11.6%和 12%。同時,我國衛星導航與位置服務産業結構趨于成熟,疫情封閉使無人系統、醫療健康、防疫消殺、遠程監控、線上服務等下遊運營服務環節的應用場景非常活躍,市場規模快速擴大。根據中商情報網顯示,2022 年我國衛星導航與位置服務産業總體産值已達到 5007 億元,同比增長 6.76%。2024 年有望繼續較快增長,預計整體産值可達 6355 億元。我們認爲汽車産量的快速增長,與衛星導航與位置服務産業鏈的日趨完善,有望帶動中國·高精定位及更大領域的衛星導航市場快速發展。
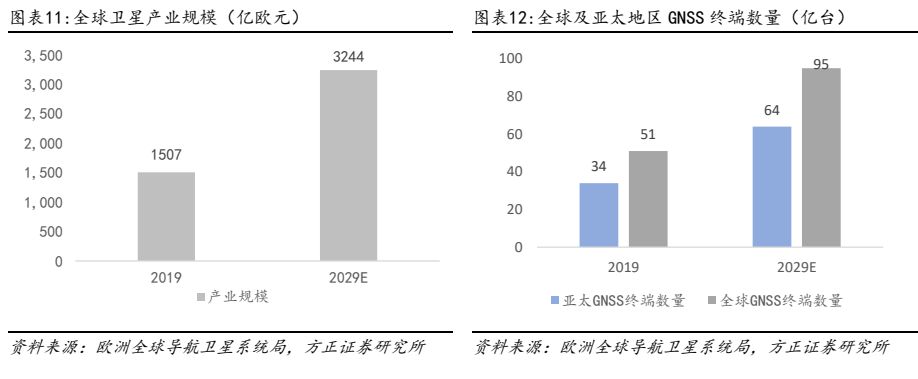
全球範圍內,高精度定位所屬的衛星導航産業發展迅速。目前,全球衛星導航系統的應用領域在不斷擴大,快速發展的物聯網將帶動更多新産品和新應用的出現,驅動全球衛星導航産業規模持續擴大,預計導航芯片、導航地圖、定位導航、位置服務等多方面的需求將繼續維持較快增長。根據歐洲全球導航衛星系統局的數據顯示,自 2019 年起,GNSS 作爲少數逆勢上漲的産業之一,未來十年預計將保持穩定增長。從終端數量看,預計 2029 年亞太地區 GNSS 終端數量將達 64 億台,約占全球終端數量的 67.4%,全球 GNSS 市場將以亞太地區爲核心。
2 有圖/無圖路線之爭,不可或缺的高精度定位
整體技術路徑上,高精度定位爲高階智駕的剛需:在“重地圖、輕感知”階段,其結合高精地圖發揮作用;在“輕地圖、重感知”階段,其匹配使用 ADAS 地圖、提升 BEV 算法效果,從而具備車端 SLAM 建圖能力、感知樣本真值標注能力,並爲智能駕駛各個運動場景提供底層數據支撐。
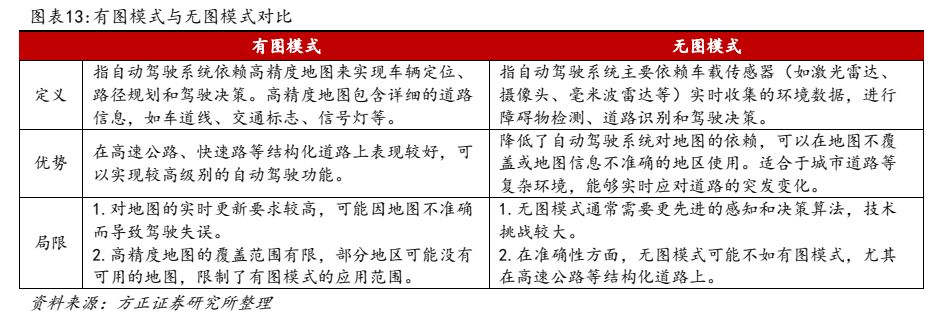
2.1 有圖模式:“定位+地圖”構成車載導航全景圖
提供准確安全可靠的高精度定位信息,是智能網聯汽車安全行駛的重要前提。精准的車輛定位信息能夠幫助車輛更好的使用高精度地圖,並爲決策規劃、運動控制模塊提供有效的參數信息。高精度定位模塊是智能網聯汽車的核心模塊,也是車輛自主導航、自動駕駛的重要支撐。其中,對于自動駕駛車輛,尤其是 L3 及以上級別的自動駕駛車輛,對高精度定位的需求是剛性的,不可或缺的。
高精度地圖將大量的行車輔助信息存儲爲結構化數據,並通過雲端實時更新高精度動態地圖數據。高精地圖可提供兩類信息,第一類是道路數據,比如車道線的位置、類型、寬度、坡度和曲率等車道信息。第二類是車道周邊的固定對象信息,比如交通標志、交通信號燈等信息、車道限高、下水道口、障礙物及其他道路細節,還包括高架物體、防護欄、道路邊緣類型、路邊地標等基礎設施信息。並且這些信息都有地理編碼,導航系統可以准確定位地形、物體、路面的幾何結構、道路標示線的位置等,從而引導車輛行駛。

高精度定位與高精度地圖緊密聯系,爲自動駕駛汽車路線規劃,道路感知,駕駛控制提供支持。首先,高精度地圖數據的采集、處理、以及地圖的建模都需要以高精度的位置坐標作爲框架。高精度地圖中道路和場景是自動駕駛汽車感知和決策的數據基礎,若在制圖過程中位置標定出現誤差,就有可能造成自動駕駛系統的判斷失誤。其次,以高精度地圖爲基礎,結合感知匹配實現高精度的自主導航定位,在定位信號中斷或不穩定的情況下,保證自動駕駛汽車仍明確知曉車輛在當前環境中的准確位置。而高精度地圖與高精度定位相結合,車輛能夠提供了解當前位置可能的道路特征情況,調高傳感器的識別精度,降低對于傳感器的性能要求。
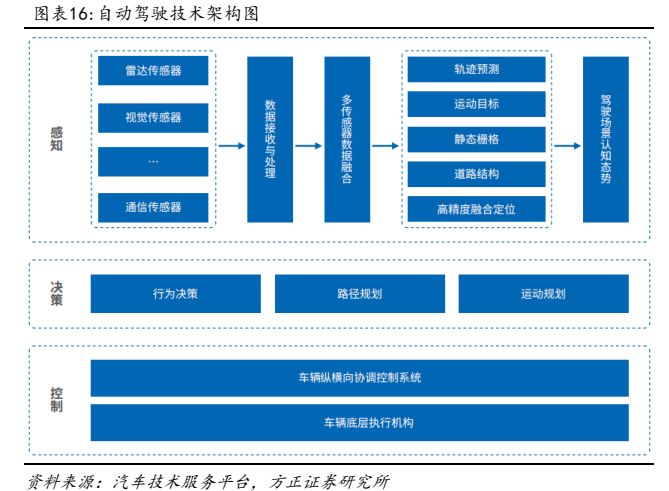
具體到自動駕駛控制,可將自動駕駛流程分爲“感知層-決策層-執行層”。在感知層,車輛通過攝像頭、毫米波雷達、激光雷達等設備獲取周圍場景信息,實現周圍感知;將周圍場景信息與高精度地圖進行比對,確定車輛相對位置,並通過GNSS、RTK 定位、慣性導航系統確定自身姿態、速度和絕對位置,共同實現自我感知。在決策層,算法將依據高精地圖、車聯網技術提供的多維度信息對具體駕駛問題做出判斷、輸出車輛控制信號並交給執行層執行。
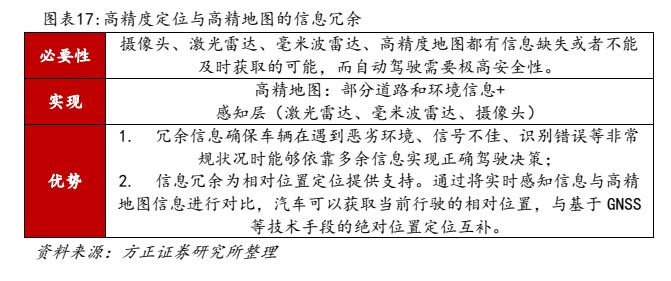
高精度定位和高精度地圖作爲感知層重要的信息獲取手段,是實現智能駕駛的重要支撐,兩者結合能夠保證足夠的安全冗余,強化系統感知層和決策層的能力:
1)輔助驗證感知信息,並幫助系統實現超視距的感知;
2)精確確定車輛在地圖中的位置;
3)幫助決策層完成車道級的路徑規劃;
4)提高決策層轉向、加速和刹車指令的准確性。

2.2 無圖模式:“定位+感知”高精度定位重要性
實現“定位+感知”,解決智能駕駛城區道路的複雜難題。該路線核心是通過大規模真實與仿真道路數據的學習和訓練,不斷叠代升級輔助駕駛算法能力,從而提升車輛自身感知能力。以數據爲驅動的感知能力提升,推動車輛決策規劃的智能性與穩定性提升,在不再依賴高精度地圖的情況下,仍能實現智能駕駛,從而解決智能網聯汽車在城市道路行駛的複雜難題。
高精度定位提供絕對定位信息,降低算法需求,助力城區導航輔助駕駛成功落地。
感知和定位是智能駕駛的基礎能力,作爲智能駕駛系統上遊的輸入信息,感知和定位對之後的決策規劃十分重要。爲了保證駕駛安全,定位要求可靠、可用、連續和完好,在衛星信號丟失時依然能實現車道級准確定位,即提供絕對定位數據,這就使得高精度定位方案成爲智能汽車的必備零部件。當智能駕駛功能從高速擴展到城區道路時,高精度的定位系統發揮的作用已超過解決“我在哪兒”。它是BEV 算法中多傳感器數據融合、時序融合的主力,有助于提升車輛的實時感知能力,降低輕地圖對算法的需求,還能助力局部地圖的構建,成爲落地城區導航輔助駕駛的關鍵組成部分。
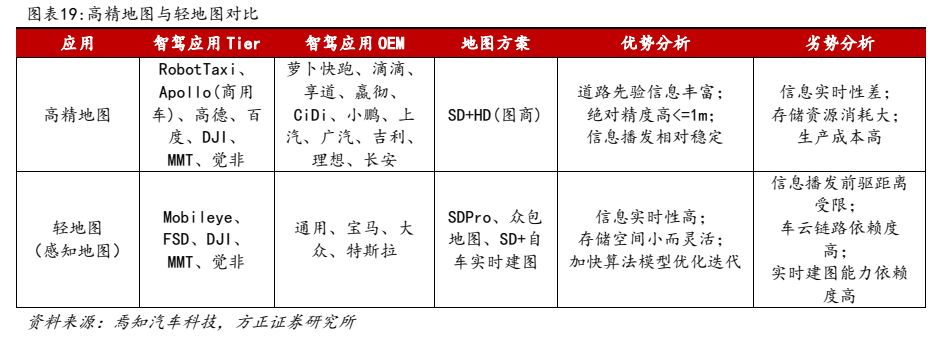
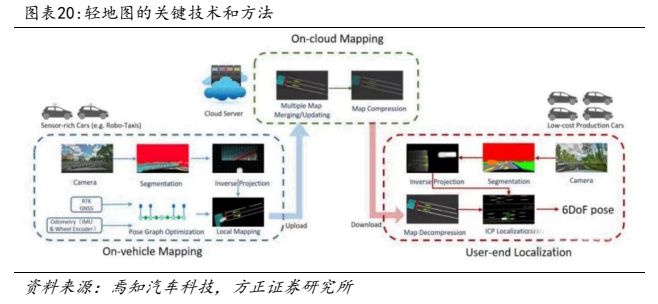
高精度定位助力車企“去”高精地圖,實現“重感知、輕地圖”。出于地圖資質受限,加之高精地圖本身成本高、覆蓋率低等缺點,讓車企不得不轉向去高精地圖的道路,轉向“重感知、輕地圖”的自動駕駛方案,即在原有高精地圖的架構基礎上,區分圖層和要素,根據智駕系統下遊的需求,通過減少圖層和元素,降低地圖的采集和更新成本,加快更新的周期。車輛遇到複雜場景時,需要通過多幀周視攝像頭數據實現感知的多幀融合 BEV 算法,以減輕相機遮擋,得到更精確的3D 檢測結果,同時對移動物體進行運動預測,爲車輛規控提供依據。而實現多幀融合的 BEV 算法的關鍵則是基于高精度定位得到的精確位置信息。
高精度定位可滿足複雜場景下更高車輛感知、定位能力要求。由于實際落地時,車輛面臨更複雜的環境,行業開始探索更細分的場景,即聚焦用戶行車的高頻路段,通過多次行駛建立局部地圖,更快實現城市導航輔助駕駛。這其中涉及了衆多傳感器,包括激光雷達、攝像頭、高精度定位等,以實現相對較高精度的局部地圖。而強調“重感知,輕地圖”增加了傳感器數量,無疑也增加了對算力的要求,高精度絕對定位技術在一定程度彌補了該不足,滿足該方案下感知、定位要求。對前端而言,可以利用高精度定位使車輛獲得自己的運動信息,基于這些信息賦予感知算法時間和空間的記憶能力,實現更優性能。對後端而言,當前感知算法十分依賴雲端大量數據的運算及訓練結果,基于高精度定位等關鍵零部件才能在後端完成場景重建,並實現自動標注,用于感知訓練。
高精度定位提供更可靠、穩定的道路信息,提升城市智能駕駛的安全性。隨著智能駕駛進入越來越多的場景,車輛面臨的挑戰也逐漸增加,對于技術的要求也更高。相較于高速場景,城區道路參與者除了車輛,還有行人、非機動車等,道路環境更加複雜和無序。而且城區道路還面臨頻繁修路改道的情況,某些路段可能每天都有一定變化。面對城市複雜的交通環境,其他傳感器可能受到影響。而高精度定位能提供精准可靠的時空信息,助力車輛獲得更連續穩定的實時感知結果,以提升算法整體性能。從而車輛即使在車道線模糊/消失、道路被遮擋、強光照射和暴雨等複雜情況下,都能對道路上的各種障礙物都做出准確識別,並且“定位+感知”可以更強大的感知能力構建准確、實時的局部地圖,提高城市輔助智能駕駛的安全性,從而幫助智能駕駛系統快速落地。
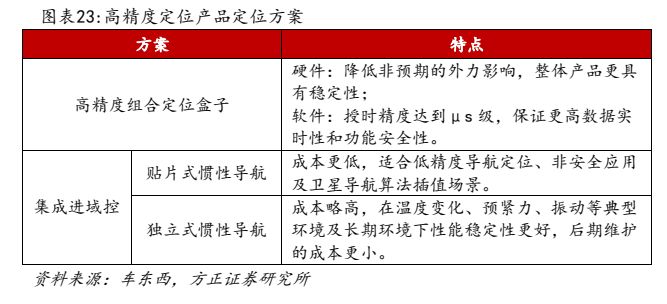
當前業內性價比的方案——高精度組合定位盒子:高精度定位經過數年發展,呈現出多種形態,包括高精度組合定位盒子;有外殼封裝的獨立式慣性導航;沒有外殼封裝,並且和域控制器 PCB 版一起的貼片式慣性導航。硬件方面,IMU 對力、溫度等的變化敏感,因此需要一個相對穩定的環境來保證工作,高精度組合定位盒子則剛好可以降低非預期的外力影響,整個盒子內的器件的功率也更低,整體環境更加穩定;軟件方面,高精度組合定位盒子在處理時間同步時,可以實現的授時精度達到 μs 級,保證了更高的數據實時性和功能安全性。同時,高精度組合定位盒子在出廠前已經完成了標定,效率高、工藝成熟、成本低,産品本身的維護和管理成本也比較低,因此是一種非常具有性價比的方案。
3 格局初現,衛/慣廠商與定位服務商並立
以衛慣組合(GNSS+IMU)爲代表的我國高精度導航系統的産業鏈可分爲上遊元器件供應商、中遊系統方案集成商和下遊應用層。其中,上遊元器件供應商主要提供射頻、基帶芯片、板卡、天線以及激光/光纖陀螺儀。中遊系統方案集成商主要包括兩種:一是衛/慣廠商,結合本身優勢終端産品,開發集成應用軟件、算法軟件等,向用戶提供完整的解決方案;二是定位服務商,依托較爲完備的地基網絡增強系統,提供通用的衛星定位服務,通過年費等訂閱制的形式進行收費。下遊應用層主要涉及智能駕駛領域,將高精度導航系統和汽車工業深度融合,其成員包括各造車新勢力和傳統車企。
3.1 終端産品:衛星導航與慣性導航融合發展
慣性導航——測量感知的基礎性元件。慣性導航系統是一種不依賴外部信息、也不向外部輻射能量的自助式導航系統,是利用慣性傳感器(IMU)測量載體的比力及角速度信息,結合給定的初始條件,與 GNSS 等系統的信息融合,從而進行實時推算速度、位置、姿態等參數的自主式導航系統。慣性導航系統是車身感知定位系統的信息融合中心,具有不可替代的作用。其數據實時存在,永不消失,性能穩定,可以連續 100Hz 高頻工作,是各種定位方法中最爲可靠的,具有輸出信息不間斷、不受外界幹擾等獨特優勢,可保證在任何時刻以高頻次輸出車輛運動參數。同時它也是將視覺傳感器、雷達、激光雷達、車身系統信息進行更深層次的融合,爲決策層提供精確可靠的連續的車輛位置、姿態信息的信息融合中心。
衛星導航——全天候精確信息提供者。全球導航衛星系統(GNSS)是以人造地球衛星爲導航台,爲全球海陸空的各類軍民載體提供位置、速度和時間信息的空基無線電導航定位系統。衛星導航系統主要包括全球四大導航衛星系統,以及區域系統和增強系統。全球4 大衛星導航系統供應商,包括美國的全球定位系統GPS、俄羅斯的格洛納斯衛星導航系統(GLONASS)、歐盟的伽利略衛星導航系統(GALILEO)和中國的北鬥衛星導航系統(BDS)。此外,還有日本、印度等國家的區域衛星導航系統。
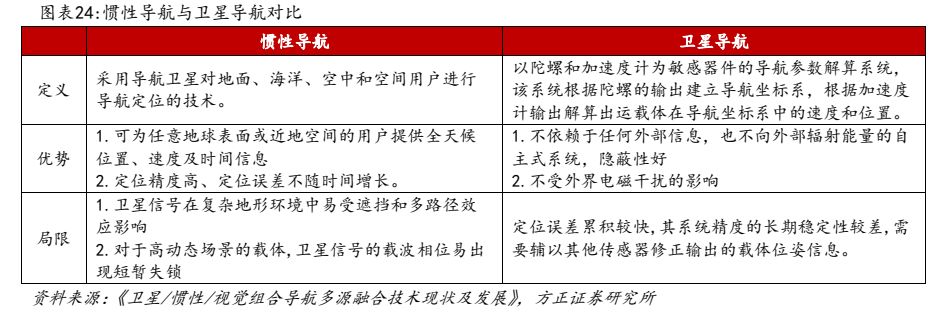
高精定位方案將衛星定位、慣性定位技術相互融合、優勢互補。衛星、慣性導航方式有各自的不足。衛星信號在複雜地形環境中易受遮擋和多路徑效應影響;對于高動態場景的載體,衛星信號的載波相位易出現短暫失鎖。 慣性導航的積分推算方式使得其定位誤差累積較快,其系統精度的長期穩定性較差,需要輔以其他傳感器修正輸出的載體位姿信息。隨著自動駕駛等級不斷提高,高精定位方案不斷將衛星定位、慣性定位技術相互融合、優勢互補,形成目前市場上最廣泛應用的衛慣組合定位方案。如,定位定向系統(POS 系統),是指慣性導航+GNSS 衛星導航組合的高精度位置與姿態測量系統,利用裝在載體上的衛星接收機精確測定空間位置,利用慣性測量裝置測定瞬間傳感器姿態,通過精確時鍾將兩者結合起來,最後經過運算,獲取載體的速度和姿態、位置等信息。

衛慣組合導航系統的耦合深度影響性能表現。從車載組合導航系統的開發量産難度主要體現在將 GNSS 單元、IMU 單元、GNSS 天線等耦合的技術能力,耦合的深度影響組合導航的性能表現。通常按照耦合組織結構將衛慣組合導航系統分爲松耦合、緊耦合和深耦合。技術角度來看,車輛從“ GNSS + RTK + IMU ”定位組合中獲得車輛位置的預測值,從高精地圖中獲取該位置附近的環境特征,之後將掃描識別的環境特征與高精地圖記述的環境特征匹配融合,獲取車輛當前場景下精確的位置信息。該過程中,各工作單元之間信息相互耦合,結果相互冗余,從而保障了定位的精度和可靠性。
高精度定位終端設備市場集中度較高,衛星導航領域國産占有率不斷提升。高精定位市場進入壁壘較高,參與者相對不多。在慣性導航領域,Bosch、ST 等頭部企業合計占據中國加速度計市場 70%以上份額,占據陀螺儀 80%以上份額,占據IMU 85%以上份額,國産市占較低、業務規模小,亟需國産替代;在衛星導航領域,國産憑借價格優勢,市占較高,競爭格局呈現爲以軍工科研院所爲主,民營軍工企業技術不斷提升、配套層級不斷提升的態勢。
--- 報告摘錄結束 更多內容請閱讀報告原文 ---
報告合集專題一覽 X 由【報告派】定期整理更新
(特別說明:本文來源于公開資料,摘錄內容僅供參考,不構成任何投資建議,如需使用請參閱報告原文。)
精選報告來源:報告派新能源 / 汽車 / 儲能
新能源汽車 | 儲能 | 锂電池 | 燃料電池 | 動力電池 | 動力電池回收 | 氫能源 | 充電樁 | 互聯網汽車 | 智能駕駛 | 自動駕駛 | 汽車後市場 | 石油石化 | 煤化工 | 化工産業 | 磷化工 | 基礎化工 | 加油站 | 新材料 | 石墨烯 | 高分子 | 耐火材料 | PVC | 聚氯乙烯 | 綠色能源 | 清潔能源 | 光伏 | 風力發電 | 海上發電




飛行汽車、水陸兩用汽車?